Monolithic solver (Lagrange and DG formulation)
Section author: contribution by Benjamin Terschanski
This example shows how to work with composite spaces of different polynomial order to construct LBB stable pairs for velocity and pressure approximations.
Consider the stationary stokes problem with Newtonian stress on a unit square \(\Omega = [0,\,1]^2\). Governing Equations are
\begin{align} -\mu\nabla^2\mathbf{u} + \nabla p &= \mathbf{f} \qquad \text{Conservation of Momentum} \\ -\nabla \cdot \mathbf{u} &= 0 \qquad \text{Conservation of Mass} \\ \end{align}
The problem is closed with Dirichlet boundary conditions
where \(u_D = u_D(x,y)\) will be taken from the analytical solution of the testcase defined later. Please note that the weak forms defined here assume Dirichlet velocity boundary conditions on the entire domain boundary \(\partial \Omega\) and we thus avoid having to distinguish between Dirichlet and non-Dirichlet parts of the exterior boundary ds.
We first introduce a discrete domain \(\Omega_h\) with a structured quadrilateral grid:
[1]:
from matplotlib import pyplot
from dune.grid import structuredGrid
from dune.ufl import cell
from ufl import SpatialCoordinate, FacetNormal
import numpy as np
gridView = structuredGrid([0, 0], [1, 1], [7, 7])
dim_space = gridView.dimGrid
spatial_coordinate = SpatialCoordinate(cell(dim_space))
A weak form of stationary stokes problem reads
where the underlined terms vanish if \(\mathbf{v_h} \in H_0^1(\Omega_h)\). Here, \(\mathbf{u_h}\) and \(\mathbf{v_h}\) \(\in V_h\) denote vector-valued (in our case 2D) trial- and test-functions for the velocity, \(p_h\) and \(q_h\) \(\in Q_h\) denote trial- and test-function for the pressure. In this example we will chose \(V_h\) and \(Q_h\) as polynomial spaces of order \(P^k\) and \(P^{k-1}\) for velocity and pressure respectively (“Taylor-Hood Elements”). This combination is well-known for being LBB-stable / satisfying a discrete inf-sup condition for the problem at hand, which is a prerequisite to guarantee well-posedness of the primal form we are using.
On the DUNE side we start by initializing some geometric / ufl variables (some will only be needed later on for the DG version of our approximation).
[2]:
from ufl import div, grad, dot, inner, dS, dx, ds, jump, avg, CellVolume, FacetArea, MinCellEdgeLength, MinFacetEdgeLength, conditional
from dune.ufl import Constant
import numpy as np
# Surface normal on the exterior boundary
n = FacetNormal(cell(dim_space))
# each element facet has sides + | - with normal ne=n('+') pointing
# from + to - ( meaning + |-> -)
# in the notation of the paper: superscript "int" == ('+'), "ext" == ('-')
# see (BDK12) for more details
ne = n('+')
# Representative element length for interior facets
h_int = avg(CellVolume(cell(dim_space))) / FacetArea(cell(dim_space))
# Representative element length for exterior facets (boundaries)
h_ext = CellVolume(cell(dim_space)) / FacetArea(cell(dim_space))
# Penalization of discontinuities / boundary value
sigma_ip = Constant(1000, name="interior_penalty_parameter")
Taylor-Hood formulation
We now define the weak form of the stokes problem, first in a standard Continuous Galerkin (CG) setting:
[3]:
def weak_form_stationary_stokes(u,v,p,q, f,mu, dirichlet_velocity=None):
"""
Return weak form for the stationary stokes problem, given a set of trial and test basis
functions for velocity and pressure.
This weak form corresponds to the canonical saddle point problem.
:param u: (vector-valued) trial function for velocity (in R^d)
:param v: (vector-valued) test function for velocity (in R^d)
:param p: (scalar) trial function for pressure (in R)
:param q: (scalar) test function for pressure (in R)
"""
# Note: This assumes Dirichlet Velocity BCs everywhere so we don't need
# the boundary integrals which are shown here for completeness
viscous_stress = mu*inner(grad(u), grad(v))*dx # - inner(dot(grad(u),n), v)*ds
pressure_force = -p*div(v)*dx # + p*dot(v,n)*ds
continuity = div(u)*q*dx
lhs_terms = viscous_stress + pressure_force + continuity
if (dirichlet_velocity!=None):
"""
`dirichlet_velocity` input argument can be used to enforce
velocity Dirichlet BCs weakly (e.g. by penalizing deviations of u
from `dirichlet_velocty` on the boundary, "Nietzsche's Method")
"""
nietzsche_terms = (sigma_ip/h_ext)*dot(u-dirichlet_velocity, v)*ds
lhs_terms += nietzsche_terms
return lhs_terms == dot(f, v)*dx
Bercovier-Engelmann Testcase
Reference case with analytical solution which was originally published in [BE79]. Equations for \(f\) are taken from the benchmark document [APFC17]:
With \(\mu\equiv 1\) the problem has the analytical solution \begin{align*} u(x,y) &= -256\,y\,(y-1)\,(2\,y -1)\,x^2\,(x-1)^2 \\ v(x,y) &= 256\,x\,(x-1)\,(2\,x-1)\,y^2\,(y-1)^2 \\ p &= (x-0.5)\,(y-0.5) \\ \mathbf{f} &= (f_1(x,\,y) + (y-0.5), -f_1(y,\,x) + (x-0.5))^T \end{align*} where \(f_1(x,\,y) = 256\,[x^2\,(x-1)^2\,(12\,y-6) + y\,(y-1)\,(2\,y-1)(12\,x^2 -12\,x + 2) ]\)
[4]:
from dune.ufl import DirichletBC
from ufl import as_vector
from dune.fem.function import gridFunction
x = spatial_coordinate[0]
y = spatial_coordinate[1]
u_exact = gridFunction(256*y*(y-1)*(2*y-1)*x**2*(x-1)**2,
gridView,
name="analytical_solution_x",
order=5)
v_exact = gridFunction(256*x*(x-1)*(2*x-1)*y**2*(y-1)**2,
gridView,
name="analytical_solution_y",
order=5)
p_exact = gridFunction((x-0.5)*(y-0.5),
gridView,
name="analytical_solution_pressure",
order=5)
def f_1(x,y):
return 256*(x**2*(x-1)**2*(12*y-6) + y*(y-1)*(2*y-1)*(12*x**2 -12*x + 2))
f_exact = gridFunction(as_vector([f_1(x,y) + (y-0.5), -f_1(y,x) +(x-0.5)]),
gridView,
name="analytical_solution_force_term",
order=5)
mu = 1
Continuous Galerkin (CG) setup
[5]:
print("\n")
print("----------------------")
print("Set up composite space and scheme in CG setting: \n")
from dune.fem.space import lagrange, composite
from ufl import TrialFunction, TestFunction, as_vector, eq, conditional
from dune.fem.scheme import galerkin as solutionScheme
from dune.ufl import BoundaryId
velocity_order = 3
space_velocity = lagrange(gridView,
dimRange=dim_space,
order=velocity_order,
storage="numpy")
space_pressure = lagrange(gridView,
dimRange=1,
order=velocity_order-1,
storage="numpy")
taylor_hood_space = composite(space_velocity, space_pressure, components=["velocity", "pressure"])
U = TrialFunction(taylor_hood_space)
V = TestFunction(taylor_hood_space)
u_h = as_vector([U[0], U[1]])
v_h = as_vector([V[0], V[1]])
p_h = U[2]
q_h = V[2]
is_left = eq(BoundaryId(taylor_hood_space),1)
is_right = eq(BoundaryId(taylor_hood_space),2)
is_bot = eq(BoundaryId(taylor_hood_space),3)
is_top = eq(BoundaryId(taylor_hood_space),4)
dirichlet_bcs_exact = [DirichletBC(taylor_hood_space, [u_exact, v_exact, None], is_left),
DirichletBC(taylor_hood_space, [u_exact, v_exact, None], is_right),
DirichletBC(taylor_hood_space, [u_exact, v_exact, None], is_bot),
DirichletBC(taylor_hood_space, [u_exact, v_exact, None], is_top)]
print("velocity element order: " + str(taylor_hood_space.components[0].order))
print("pressure element order: " + str(taylor_hood_space.components[1].order))
solution_vector_cg = taylor_hood_space.interpolate([0]*(dim_space+1), name="solution_vector_cg")
print("solution_vector.order = " + str(solution_vector_cg.order))
solver_parameters ={"nonlinear.tolerance": 1e-10,
"nonlinear.verbose": False,
"linear.tolerance": 1e-14,
"linear.preconditioning.method": "ilu",
"linear.verbose": False,
"linear.maxiterations": 1000}
# Alternative (commented) version uses weakly imposed boundary conditions:
# eqns = weak_form_stationary_stokes(u_h, v_h, p_h, q_h, f_exact, mu, as_vector([u_exact, v_exact]))
eqns = [weak_form_stationary_stokes(u_h, v_h, p_h, q_h, f_exact, mu), *dirichlet_bcs_exact]
scheme_taylor_hood_cg = solutionScheme(eqns,
space=taylor_hood_space,
parameters=solver_parameters,
solver=("istl", "bicgstab"))
----------------------
Set up composite space and scheme in CG setting:
velocity element order: 3
pressure element order: 2
solution_vector.order = 3
Note
Linear solvers and preconditioning: The matrix arising from the stokes discretization with mixed fem is indefinite and solving the linear system with iterative solvers can become challenging (to impossible) without proper preconditioning. For this toy problem, a combination of incomplete LU preconditioning and bicgstab works well. Other options include direct solvers or using Schur-complement preconditioners, due to the block structure of the Stokes matrix
Test solve with CG on the toy mesh:
[6]:
print("\n")
print("----------------------")
print("Test solve with continuous galerkin on the base mesh: \n")
sigma_ip.value = 100
solution_vector_cg.interpolate([0]*(dim_space+1))
output = scheme_taylor_hood_cg.solve(target = solution_vector_cg)
print("Solve finished! \n")
print("number linear iterations: " + str(output['linear_iterations']))
----------------------
Test solve with continuous galerkin on the base mesh:
Solve finished!
number linear iterations: 13
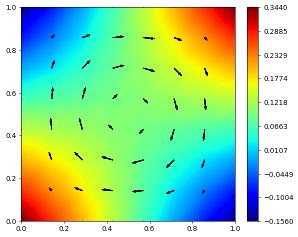
Here is a plot of the pressure and velocity field:
[7]:
fig = pyplot.figure()
solution_vector_cg.plot(vectors=[0,1], gridLines=None, figure=fig)
solution_vector_cg[2].plot(figure=fig, gridLines=None)
DG formulation
In the DG framework the weak form becomes more complicated because we have to deal with a discontinuous basis. The discontinuities yield a bunch of jump terms on the inter-element boundaries (interior facets) that we have to approximate. A full coverage of the DG setup is beyond the scope of this tutorial, the references below can serve as starting point. TODO add reference
[8]:
# Switch for interior penalty stabilization method
# -1: symmetric interior penalty (SIP)
# 1: non-symmetric " " (NIPG)
# 0: stabilization off
method_switch_ip = Constant(-1.0, name="switch_interior_penalty_method")
gamma_grad_div = Constant(0.0, name="grad_div_stab_param")
"""
Switch / penalty parameter for "grad/div"-type stabilization term,
adds an additional penalization of the discrete divergence
(gamma_grad_div*div(v_h)*div(u_h)*dx ) where u_h, v_h are trial-
and test-functions for velocity.
See also Eqn. (41) of
https://doi.org/10.48550/arXiv.1711.04442 for the definition
and further discussion.
"""
gamma_mass_flux = Constant(0.0, name="mass_flux_stab_param")
"""
Switch / penalty parameter for "mass-flux" stabilization, e.g.
a penalization of deviations of the velocity from the H1_div
space. More precisely, jumps in the normal component of the
discrete velocity are penalized, yielding a "better" element-local mass
conservation.
This could be intuitively thought of as
pushing the solution from a DG approximation space to behave like
a solution from a H_div conforming space (RT, ...).
Full discussion in https://doi.org/10.48550/arXiv.1711.04442 , see Eqn. (18)
"""
gamma_stab_cburn = Constant(0.0, name="stab_cburn")
"""
Gamma from Eqn (19) for the stabilization term j0 defined in Eqn (18)
of https://doi.org/10.1016/j.cma.2018.07.019
"""
def c_h_cburn(p,q):
""" Stabilization term from https://doi.org/10.1016/j.cma.2018.07.019 (Eqn. 19)"""
return gamma_stab_cburn*h_int*dot(jump(p)*ne, jump(q)*ne)*dS
def weak_form_stationary_stokes_dg(u,v,p,q,f,mu, is_dirichlet_velocity, dirichlet_value_velocity):
"""
Return weak form for the stationary stokes problem, given a set of trial and test basis
functions for velocity and pressure. The viscous stress is discretized
with SIPG.
The exact DG form / fluxes correspond to the method documented in https://doi.org/10.48550/arXiv.1711.04442
In particular, viscous_stress = a(u, v), pressure_force = b(v,p)
:param u: (vector-valued) trial function for velocity (in R^d)
:param v: (vector-valued) test function for velocity (in R^d)
:param p: (scalar) trial function for pressure (in R)
:param q: (scalar) test function for pressure (in R)
"""
# Interior penalty stabilization of viscous terms and penalization
# of jump discontinuities (also used to weakly enforce Dirichlet BCs in the
# last term)
viscous_stress = inner(grad(u), grad(v))*dx \
- dot(avg(grad(u))*ne, jump(v))*dS \
- dot(grad(u)*n, v)*is_dirichlet_velocity*ds \
+ method_switch_ip*dot(avg(grad(v))*ne, jump(u))*dS \
+ method_switch_ip*dot(grad(v)*n, u - dirichlet_value_velocity)*is_dirichlet_velocity*ds \
+ (sigma_ip/h_int)*dot(jump(u),jump(v))*dS \
+ (sigma_ip/h_ext)*dot(u - dirichlet_value_velocity,v)*is_dirichlet_velocity*ds
#2: pressure_force = b_div(v, p)
pressure_force = - p*div(v)*dx \
+ avg(p)*dot(jump(v), ne)*dS \
+ p*dot(v,n)*ds
# Optional stabilization terms, can be turned off by setting gamma_grad_div.value = 0, gamma_mass_flux.value = 0
# TODO: do we need mu for the stabilization (which one)?
grad_div_stabilization = gamma_grad_div*div(u)*div(v)*dx
mass_flux_stabilization = gamma_mass_flux*((1/h_int)*dot(jump(u),ne)*dot(jump(v),ne)*dS \
+(1/h_ext)*dot(u - dirichlet_value_velocity, n)*dot(v, n)*ds )
pressure_stabilization = c_h_cburn(p, q)
stab_terms = grad_div_stabilization + mass_flux_stabilization + pressure_stabilization
continuity = - q*div(u)*dx \
+ avg(q)*dot(jump(u), ne)*dS \
+ q*dot(u - dirichlet_value_velocity,n)*ds
return mu*viscous_stress + pressure_force + continuity + stab_terms == dot(f, v)*dx
The DG weak form introduces a penalty for discontinuities in the discrete velocity. For a sufficiently large value of the penalty parameter sigma_ip penalization ensures coercivity of the bilinear form defined as viscous_stress above. However, increasing the penalty parameter has an adverse effect on the condition number of the linear system (and the numerical convergence study below suggests it also degrades the pressure convergence rate?) so one generally wants to find sigma_ip
“large enough but not too large”. The “optimal” sigma_ip would depend on the local mesh geometry and polynomial degree, here we generally just impose a global “guessed” value. Below we also offer two choices for sigma_ip from literature:
[9]:
def penalty_parameter_abkas(order_discrete_space):
""" Penalty parameter for the interior penalty DG method
Formula corresponds to to the heuristic parameter used in Sec. 6.1
of https://doi.org/10.48550/arXiv.1711.04442,
see definition of sigma on the very bottom of page 19.
"""
return 4*order_discrete_space**2
def penalty_parameter_shabazi(view, order_discrete_space):
""" Penalty parameter for the interior penalty DG method
Formula corresponds to Remark (4) of https://doi.org/10.1016/j.jcp.2004.11.017
Carefully revise the assessment of faces if the code
is ever changed to 3D! Also note that the derivation
is for simplical meshes (not for quads!)
"""
max_ratio = 0
""" max. area / volume ratio of all elements on the grid """
d = view.dimGrid
""" spatial dimension """
k = order_discrete_space
""" approximation space order """
for element in view.elements:
# Iterate all elements and find the max. ratio of area / volume
# (or edge length over area in 2D)
total_surface_area_element = 0
for face in element.subEntities(1):
total_surface_area_element += face.geometry.volume
ratio_element = total_surface_area_element / element.geometry.volume
""" the surface area / volume ratio of the current element """
max_ratio = np.max([ratio_element, max_ratio])
return ((k+1)*(k+d)/d)*max_ratio
#########################
Bercovier-Engelmann Testcase
We repeat the test from above using using a composite DG space with Lagrangian polynomial basis:
[10]:
print("\n")
print("----------------------")
print("Set up DG Scheme:")
from dune.fem.space import dglagrange, composite
velocity_order = 3
space_velocity_dg = dglagrange(gridView,
dimRange=dim_space,
order=velocity_order,
storage="numpy")
space_pressure_dg = dglagrange(gridView,
dimRange=1,
order=velocity_order-1,
storage="numpy")
taylor_hood_space_dg = composite(space_velocity_dg, space_pressure_dg, components=["velocity", "pressure"])
U = TrialFunction(taylor_hood_space_dg)
V = TestFunction(taylor_hood_space_dg)
u_h = as_vector([U[0], U[1]])
v_h = as_vector([V[0], V[1]])
p_h = U[2]
q_h = V[2]
print("DG velocity element order: " + str(taylor_hood_space_dg.components[0].order))
print("DG pressure element order: " + str(taylor_hood_space_dg.components[1].order))
is_dirichlet_velocity = Constant(1.0, "all_boundaries")
dirichlet_velocity = as_vector([u_exact, v_exact])
weak_form_stokes_dg = weak_form_stationary_stokes_dg(u_h, v_h, p_h, q_h, f_exact, mu, is_dirichlet_velocity, dirichlet_velocity)
solution_vector_dg = taylor_hood_space_dg.interpolate([0, 0, 0], name="solution_vector_dg")
solver_parameters ={"nonlinear.tolerance": 1e-10,
"nonlinear.verbose": False,
"linear.tolerance": 1e-14,
"linear.preconditioning.method": "ilu",
"linear.verbose": False,
"linear.maxiterations": 1000}
scheme_taylor_hood_dg = solutionScheme(weak_form_stokes_dg,
space=taylor_hood_space_dg,
parameters=solver_parameters,
solver=("istl", "bicgstab"))
----------------------
Set up DG Scheme:
DG velocity element order: 3
DG pressure element order: 2
Test the DG setup on the toy mesh. By default all extra stabilization is turned off but you can play around with it by modifying the Constant’s values.
[11]:
print("\n")
print("----------------------")
print("Test solve with DG on the base mesh: \n")
method_switch_ip.value = -1.0 # Corresponds to SIPG (1: NIPG, 0: Diffusive Stabilization off)
gamma_grad_div.value = 0.0
gamma_mass_flux.value = 0.0
gamma_stab_cburn.value = 0.0
velocity_order = taylor_hood_space_dg.components[0].order
sigma_ip.value = penalty_parameter_abkas(velocity_order)
print("Penalty parameter value: " + str(sigma_ip.value))
solution_vector_dg.interpolate([0, 0, 0])
output = scheme_taylor_hood_dg.solve(target = solution_vector_dg)
print("number linear iterations: " + str(output['linear_iterations']))
----------------------
Test solve with DG on the base mesh:
Penalty parameter value: 36.0
number linear iterations: 15
Convergence rate check
To validate our method we conduct a small experimental convergence study. The method convergence_study takes a scheme and executes a series of solves on a uniformly refined mesh. Special care needs to be taken when choosing a fixed penalty parameter in the DG setting, since the necessary penalization scales with the characteristic mesh element size.
[12]:
from ufl import sqrt
from dune.fem import integrate
import numpy
def convergence_study(scheme, solution_vector, refinement_steps=2, penalty = 20):
"""
Executes a sequence of solves with the mesh uniformly refined `refinement_steps` times and
computes the experimental order of convergence (EOC)
:param scheme: solution scheme to check convergence for
:param solution_vector: driscrete solution_vector
:param refinement_steps: number of refinement steps, defaults to 3
:type refinement_steps: int, optional
:param penalty: penalty parameter for DG and the weak enforcement of boundary conditions, defaults to 20
note that the DG solver is very sensitive to this parameter and the optimal value
is a function of mesh size and polynomial degree. You can set the value to `None`
to try with a heuristic guess based on the velocity polynomial degree (see
`penalty_parameter_abkas()` method)
:type penalty: int, optional
"""
l2_errors = [0,0]
h1_errors = [0,0]
velocity_order = solution_vector[0].order
pressure_order = velocity_order - 1
avg_pressure = Constant(0,name="avg_pressure") # subtract average to get unique pressure
l2_error_pressure = dot(solution_vector[2]-avg_pressure - p_exact, solution_vector[2]-avg_pressure - p_exact)
h1_error_pressure = dot(grad(solution_vector[2] - p_exact), grad(solution_vector[2] - p_exact))
numerical_velocity = as_vector([solution_vector[0], solution_vector[1]])
analytical_velocity = as_vector([u_exact, v_exact])
l2_error_velocity = dot(numerical_velocity - analytical_velocity, numerical_velocity - analytical_velocity)
h1_error_velocity = inner(grad(numerical_velocity - analytical_velocity), grad(numerical_velocity - analytical_velocity))
# Make sure that the mesh is the coarsest refinement level
# to begin with
gridView.hierarchicalGrid.globalRefine(-gridView.hierarchicalGrid.maxLevel)
for eocLoop in range(refinement_steps):
element_size = 1.0/sqrt(gridView.size(0))
if (penalty == None):
sigma_ip.value = penalty_parameter_abkas(velocity_order)
print("Penalty parameter value: " + str(sigma_ip.value))
else:
sigma_ip.value = penalty
solution_vector.interpolate([0, 0, 0])
info = scheme.solve(target = solution_vector)
print(f"\t linear iteratrion: {info['linear_iterations']}")
avg_pressure.value = solution_vector[2].integrate()
print(f"\t average pressure: {avg_pressure.value}")
l2_errors_old = l2_errors
h1_errors_old = h1_errors
l2_errors = np.array( [sqrt(e) for e in integrate([l2_error_pressure,l2_error_velocity])] )
h1_errors = np.array( [sqrt(e) for e in integrate([h1_error_pressure,h1_error_velocity])] )
# h1_errors += l2_errors
error = solution_vector - as_vector( [u_exact, v_exact, p_exact+avg_pressure.value] )
if eocLoop == 0:
eocs_l2 = ['-','-']
eocs_h1 = ['-','-']
else:
eocs_l2 = [ round(numpy.log(e/e_old)/numpy.log(0.5),2) \
for e,e_old in zip(l2_errors,l2_errors_old) ]
eocs_h1 = [ round(numpy.log(e/e_old)/numpy.log(0.5),2) \
for e,e_old in zip(h1_errors,h1_errors_old) ]
print('Step:', eocLoop, ', size:', gridView.size(0))
print('\t | p_h - p | =', '{:0.5e}'.format(l2_errors[0]), ', eoc =', eocs_l2[0])
print('\t | u_h - u | =', '{:0.5e}'.format(l2_errors[1]), ', eoc =', eocs_l2[1])
print('\t | grad(p_h - p) | =', '{:0.5e}'.format(h1_errors[0]), ', eoc =', eocs_h1[0])
print('\t | grad(u_h - u) | =', '{:0.5e}'.format(h1_errors[1]), ', eoc =', eocs_h1[1])
print("\n")
if eocLoop < refinement_steps-1:
gridView.hierarchicalGrid.globalRefine(1)
Convergence Test Continuous Galerkin:
[13]:
print("\n")
print("----------------------")
print("Test convergence with CG: \n")
print("Velocity polynomial order: " + str(taylor_hood_space.components[0].order))
print("Pressure polynomial order: " + str(taylor_hood_space.components[1].order))
convergence_study(scheme=scheme_taylor_hood_cg,
solution_vector=solution_vector_cg,
refinement_steps=2,
penalty=1000)
----------------------
Test convergence with CG:
Velocity polynomial order: 3
Pressure polynomial order: 2
linear iteratrion: 13
average pressure: 0.09403072439564121
Step: 0 , size: 49
| p_h - p | = 2.58255e-05 , eoc = -
| u_h - u | = 1.40763e+00 , eoc = -
| grad(p_h - p) | = 1.04979e-03 , eoc = -
| grad(u_h - u) | = 1.03440e+01 , eoc = -
linear iteratrion: 27
average pressure: 0.025138384285173898
Step: 1 , size: 196
| p_h - p | = 5.91246e-07 , eoc = 5.45
| u_h - u | = 1.40763e+00 , eoc = -0.0
| grad(p_h - p) | = 4.70596e-05 , eoc = 4.48
| grad(u_h - u) | = 1.03440e+01 , eoc = -0.0
Convergence Test DG: You can increase the number of refinement steps but expect a longer wait for serial runs
[14]:
print("\n")
print("----------------------")
print("Test convergence with DG: \n")
print("Velocity polynomial order: " + str(taylor_hood_space_dg.components[0].order))
print("Pressure polynomial order: " + str(taylor_hood_space_dg.components[1].order))
method_switch_ip = -1.0
gamma_grad_div.value = 0.0
gamma_mass_flux.value = 0.0
gamma_stab_cburn.value = 0.0
# Careful with penalty, sigma = 20 works for P3/P2 elements
convergence_study(scheme=scheme_taylor_hood_dg,
solution_vector=solution_vector_dg,
refinement_steps=2,
penalty=20)
----------------------
Test convergence with DG:
Velocity polynomial order: 3
Pressure polynomial order: 2
linear iteratrion: 14
average pressure: -0.08740945315165938
Step: 0 , size: 49
| p_h - p | = 5.35523e-05 , eoc = -
| u_h - u | = 1.40763e+00 , eoc = -
| grad(p_h - p) | = 1.42791e-03 , eoc = -
| grad(u_h - u) | = 1.03440e+01 , eoc = -
linear iteratrion: 31
average pressure: -0.01892144211640694
Step: 1 , size: 196
| p_h - p | = 1.80719e-06 , eoc = 4.89
| u_h - u | = 1.40763e+00 , eoc = -0.0
| grad(p_h - p) | = 9.15202e-05 , eoc = 3.96
| grad(u_h - u) | = 1.03440e+01 , eoc = 0.0
As a sanity check for the construction of the composite DG spaces we can count the degrees of freedom of the solution_vector. Each quad has \((k + 1)^2\) degrees of freedom per dimension, with \(k=\) polynomial order of the approximation function.
[15]:
def dof_count_taylor_hood_quad_mesh(velocity_order=2):
pressure_order = velocity_order -1
number_elements = gridView.size(0)
dim_space = gridView.dimension
number_velocity_dofs_lagrange_polynomial_per_quad = (velocity_order+1)**2*dim_space
number_pressure_dofs_lagrange_polynomial_per_quad = (pressure_order+1)**2
# Because for DG all DOFs are independent we can just count
# number quads * number dofs per quad
# where
# number dofs per quad = velocity_dofs + pressure_dofs
return number_elements*(number_velocity_dofs_lagrange_polynomial_per_quad + number_pressure_dofs_lagrange_polynomial_per_quad)
velocity_order = taylor_hood_space_dg.components[0].order
pressure_order = velocity_order - 1
print("\n")
print("----------------------")
print("Count DOFs:")
print("Expected dofs for taylor P" + str(velocity_order) + " / P" + str(pressure_order) + " TH elements: " + str(dof_count_taylor_hood_quad_mesh(velocity_order)))
print("DOFS composite solution vector: " + str(len(solution_vector_dg.as_numpy)))
----------------------
Count DOFs:
Expected dofs for taylor P3 / P2 TH elements: 8036
DOFS composite solution vector: 8036
This page was generated from
the notebook monolithicStokes_nb.ipynb
and is part of the tutorial for the dune-fem python bindings
![]()